
Full-Stack Robotics Engineer
Hi, I’m Kieran
I build robots end to end: mechanical design, embedded hardware, control software, and the AI on top.
Contents
Click any section, or scroll through the deck.

First of all… Hello!
I'm a Master's graduate from UC Berkeley who thrives on using engineering to solve real problems.
Everything I build starts with a real problem: from the largest robotic security fleet in the US, deployed to keep communities safe, to a swarm of ocean sensors that optimize global shipping routes.
Working across the entire stack alongside sharp people, on some of the hardest problems out there, is the part I enjoy most.










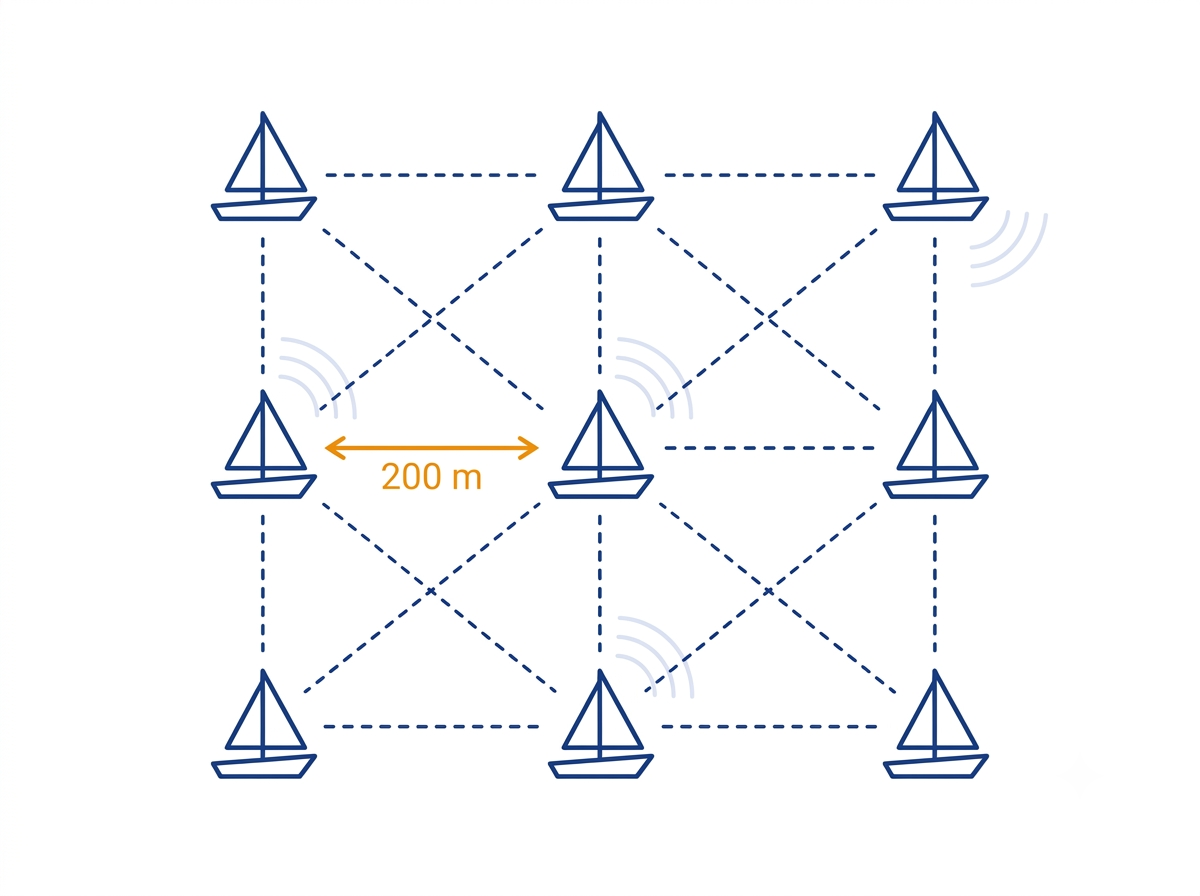
CaptAIn: Building a network of autonomous ocean drones
Cargo ships waste ~30% of fuel fighting waves. We built Google Maps for the ocean to help them save fuel.
- Wave resistance wastes up to ~30% of a cargo ship’s fuel, about 1% of all global emissions.
- Forecasting waves lets ships steer smarter, cutting fuel use by ~20% (≈ $9B a year).
- Our network of autonomous sailboats maps ocean currents in real time, steering cargo ships clear of high-wave waters.

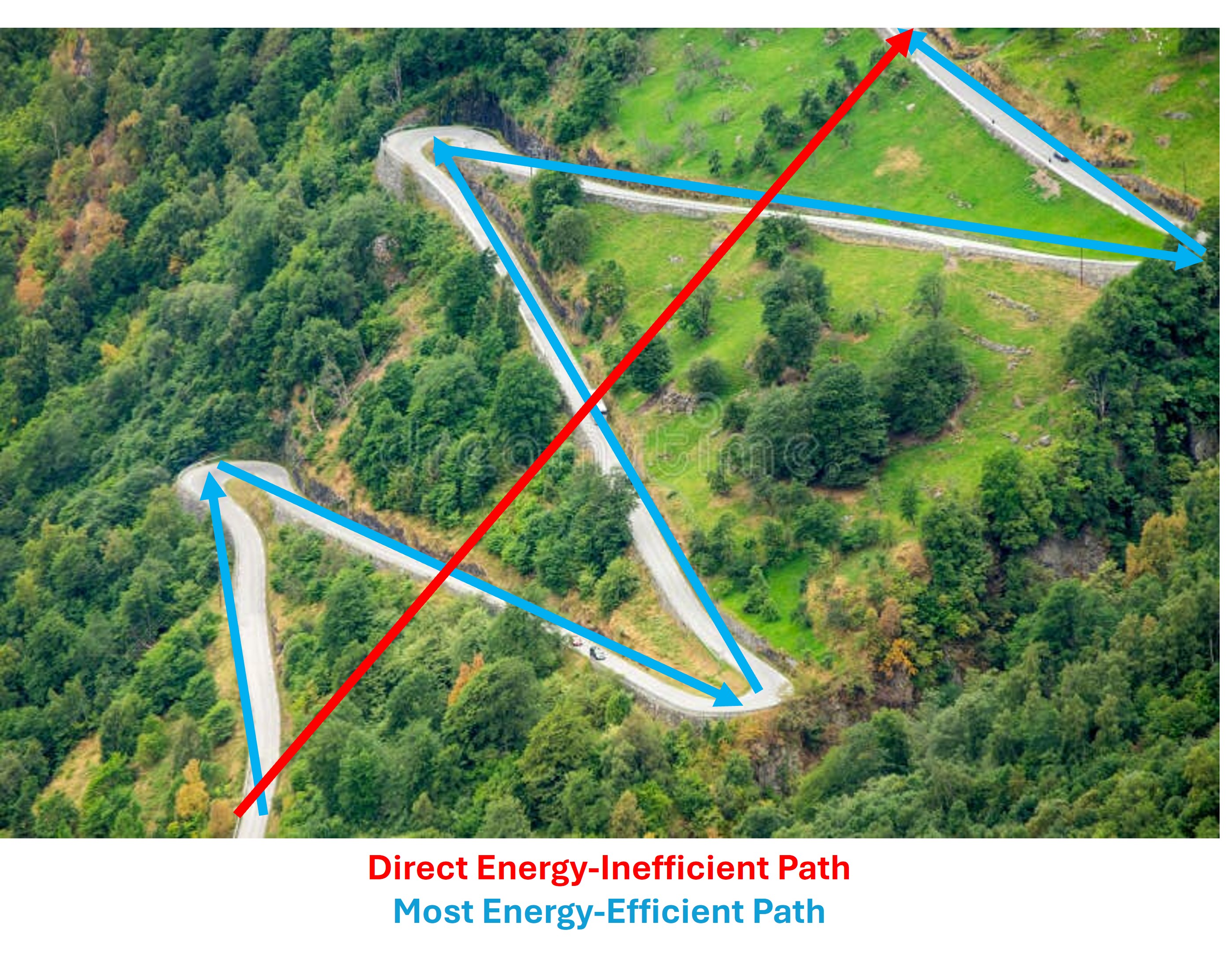
These boats run on wind, not a propeller, and you can't sail straight upwind, so my ROS2 planner has to tack (zig-zag) to reach any target:
- Beating upwind by tacking across the wind
- Dynamic waypoint tracking
- Real-time wind and heading adjustments

The result: my planner sailed the boat anywhere we pointed it.
Proven on a 2.3 km autonomous round trip up SF Bay, both upwind and downwind. 50 built and tested.
Field Testing & Sensor Improvement
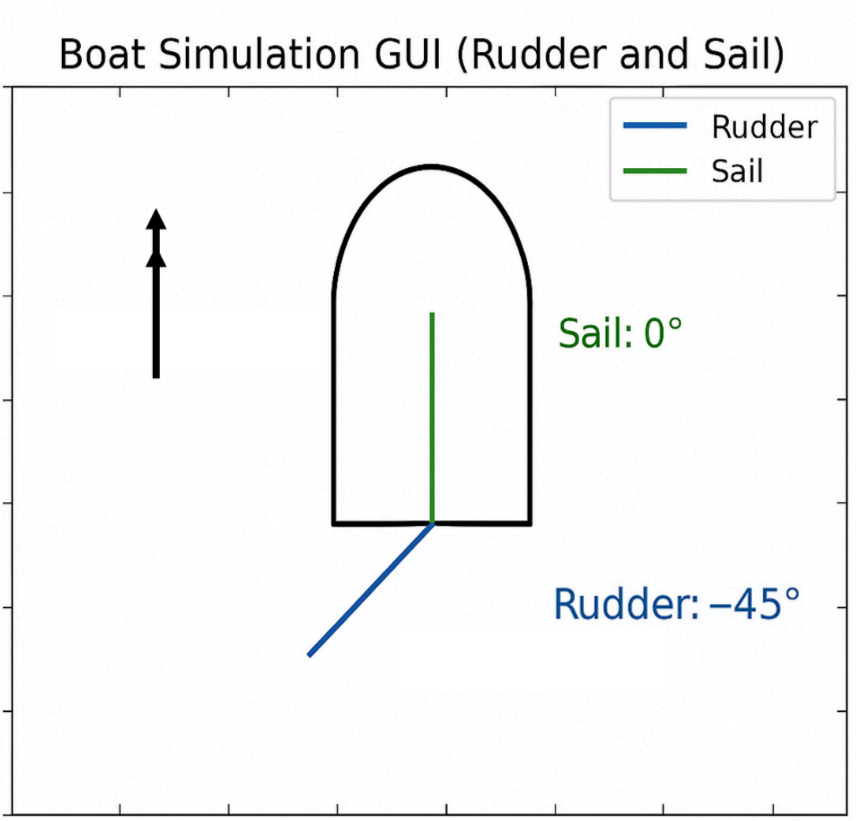
Our testing process was expensive and time-consuming.
- We were heavily dependent on tidal windows and the marina's opening hours.
- Although field testing was the best way to learn how the boat really behaved, we needed a way to rapidly test new algorithm features.
- I used our pre-existing data from prior tests to create a virtual testing environment which simulated exactly how new iterations on the control algorithm would react to real-world data.
- This let me and the team conduct hardware-in-the-loop testing in the lab, catching actuation bugs before any on-water run.
- This reduced the iteration time from days to hours.

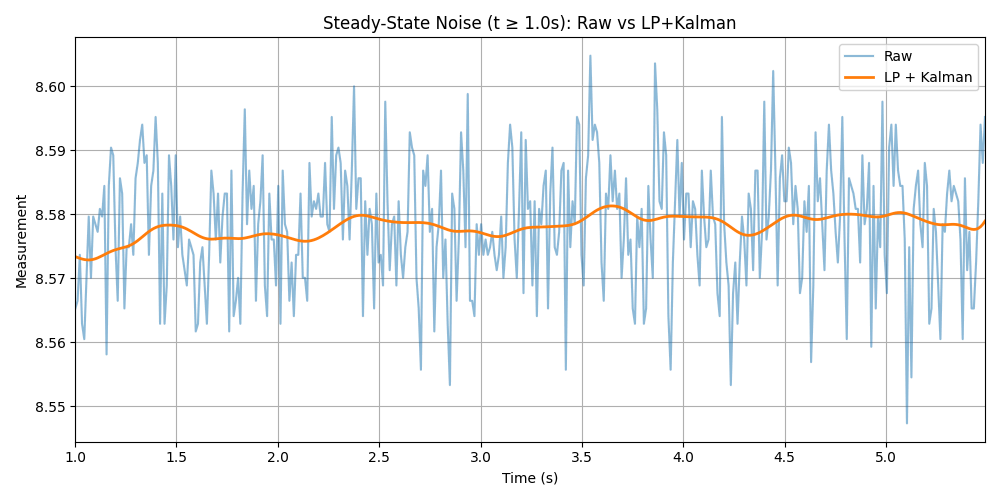
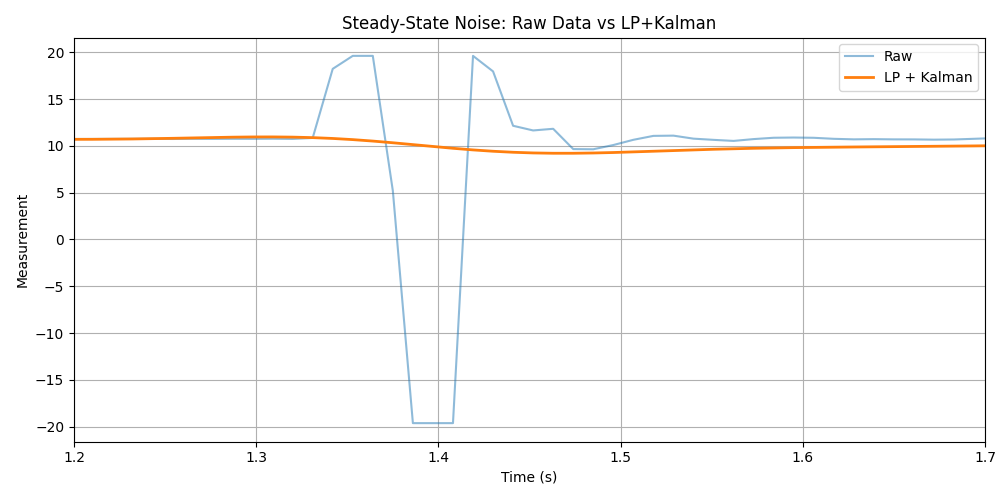
Our sensor measurements were too noisy to control the boat.
- The cheap IMUs we used, combined with the boat rocking in every wave, left the raw motion data noisy and hard to trust.
- I implemented a 1-D Kalman filter to fuse the readings and sharpen sensor confidence.
- Field testing showed an 85% drop in steady-state sensor noise (RMS).

2nd place at the Mach22 national competition.
Our inaugural entry, beating teams who'd been building their rockets for up to 3 years.
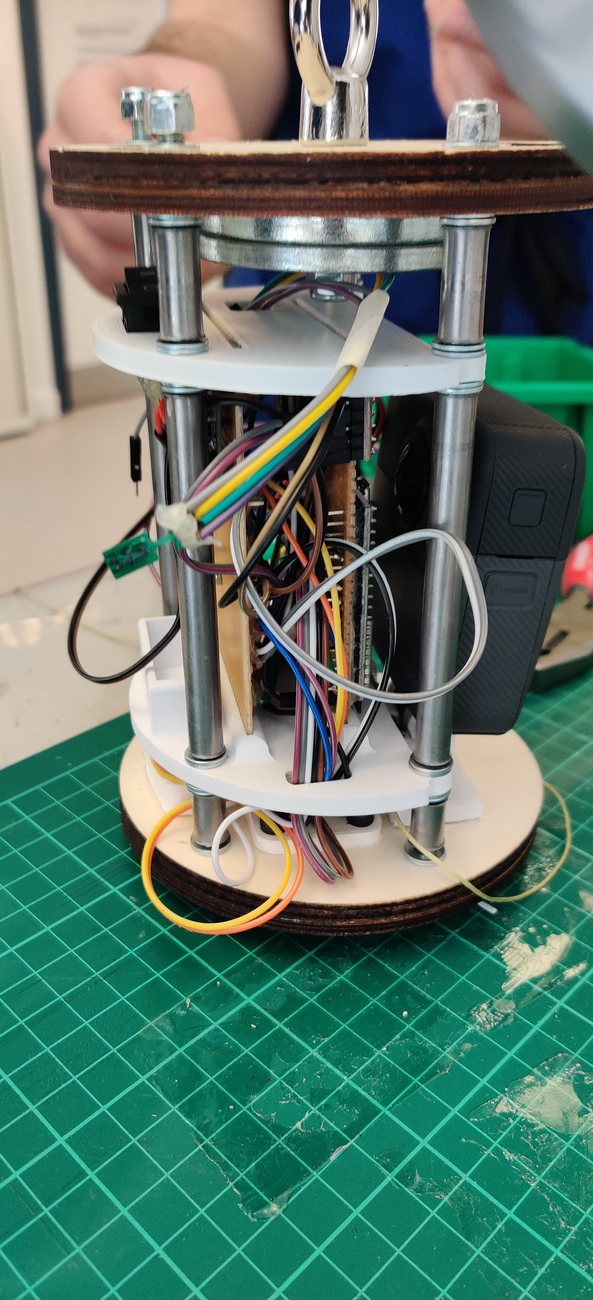
CanSat Payload: 360° Flight Video & In-Flight Air-Quality Capture
The goal
- Build a CanSat that records 360° footage of our rocket's flight.
- Collect pollutant and atmospheric data: a rapid, recoverable alternative to weather balloons.
Key contributions:
- Led a team of 5 engineers to build a CanSat, launched to 1.5 km and safely recovered.
- Owned the CAD designs and the mechanisms for parachute & 360° camera deployment.
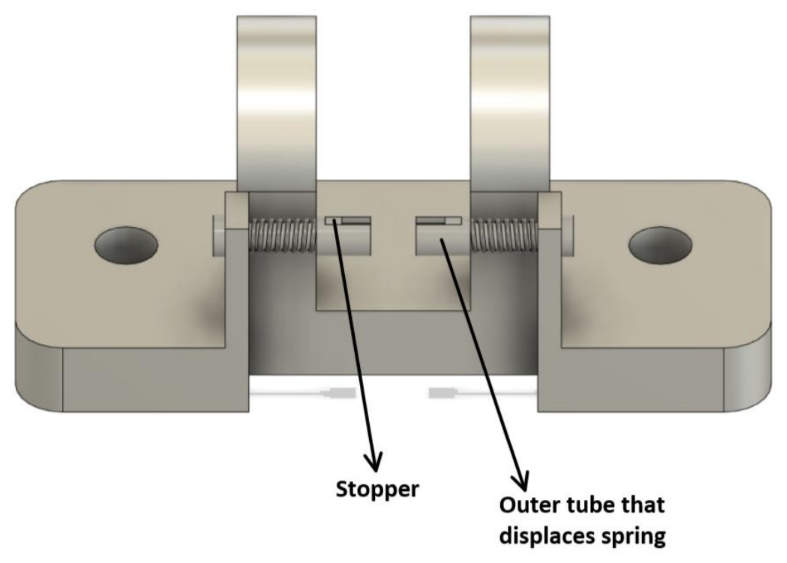
Lab testing showed the camera would shake too violently for viable footage. We designed a spring-catch mechanism that locks the GoPro steady once the payload deploys.
- As the payload deploys, an outer tube displaces a spring…
- …driving a stopper that catches and fixes the camera at 45°.
- Vibration-absorbing felt on the stopper soaks up the shake, giving a stable, usable 360° shot.
My proudest project. I helped start UCL Rocketry independently after the university declined to back us. It has since grown into UCL's most successful engineering team, with podium finishes at Spaceport America and several European competitions.
BladeRunner: Training a quadruped to run on spring blades
Creating an energy efficient running quadruped for search and rescue.
From blade physics to a trained running policy:
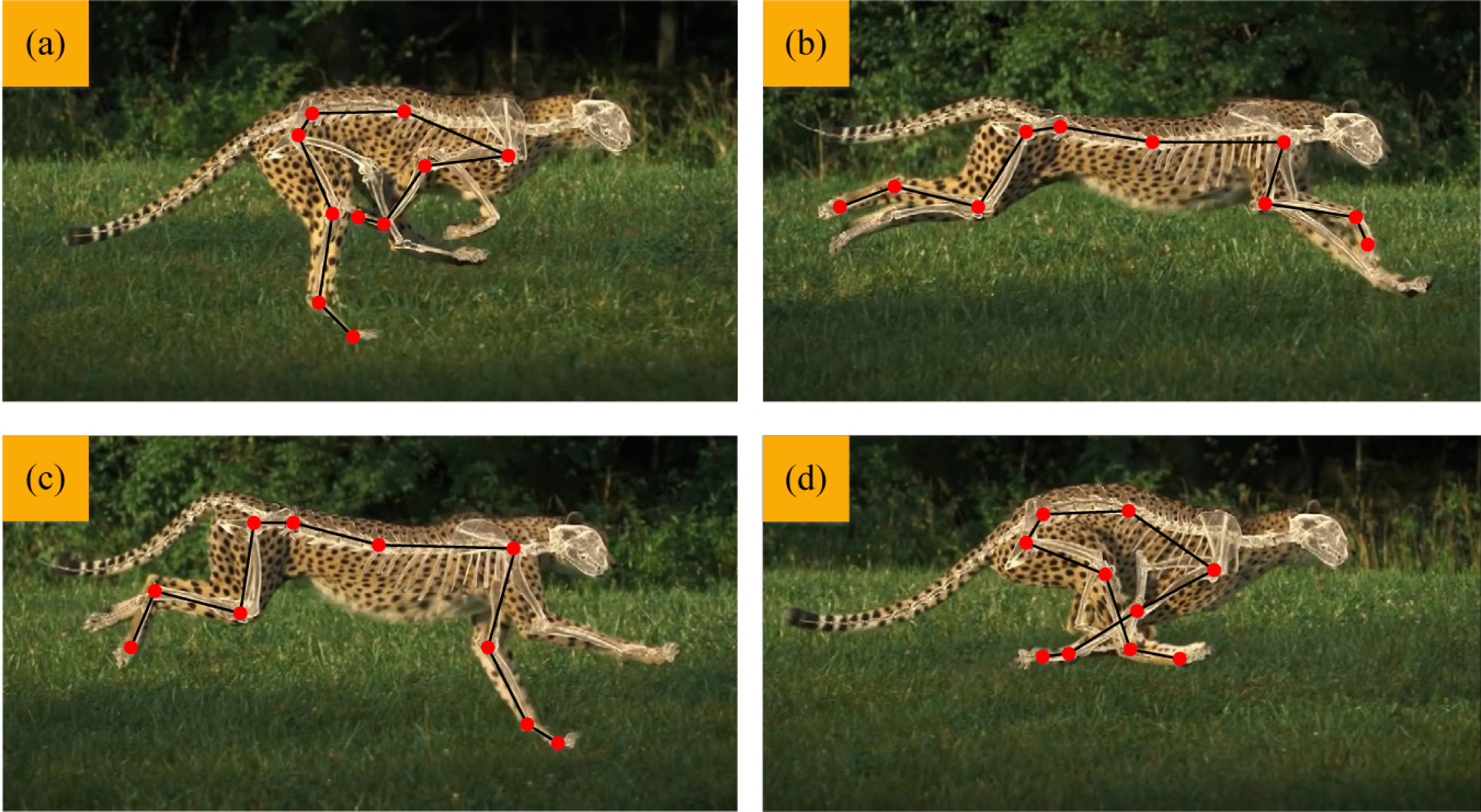
- We analysed how spring running blades store and return energy, the same prosthetic design used in Paralympic sprinting.
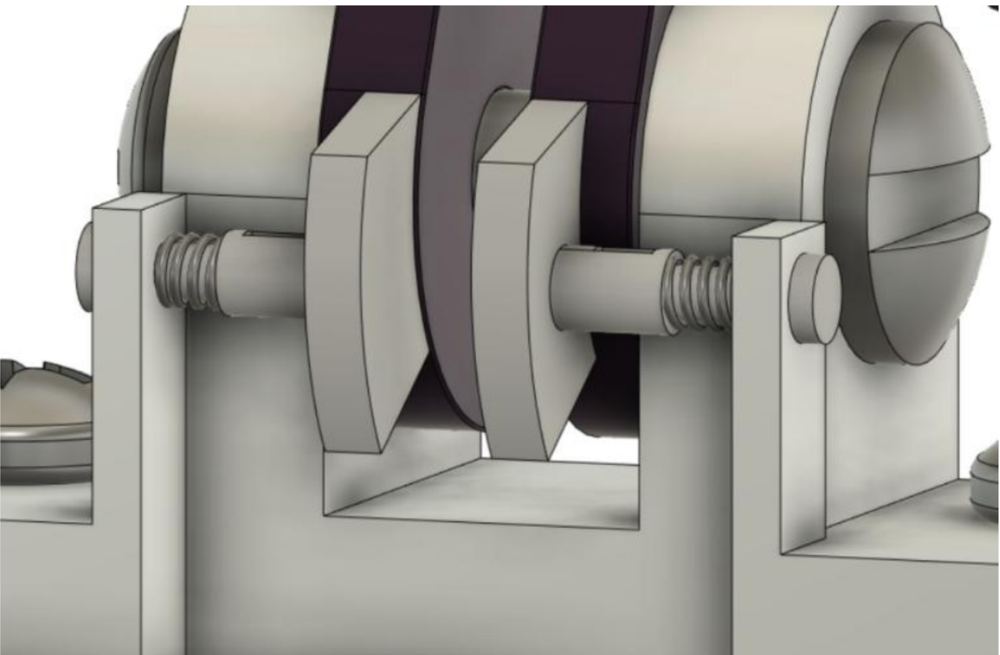
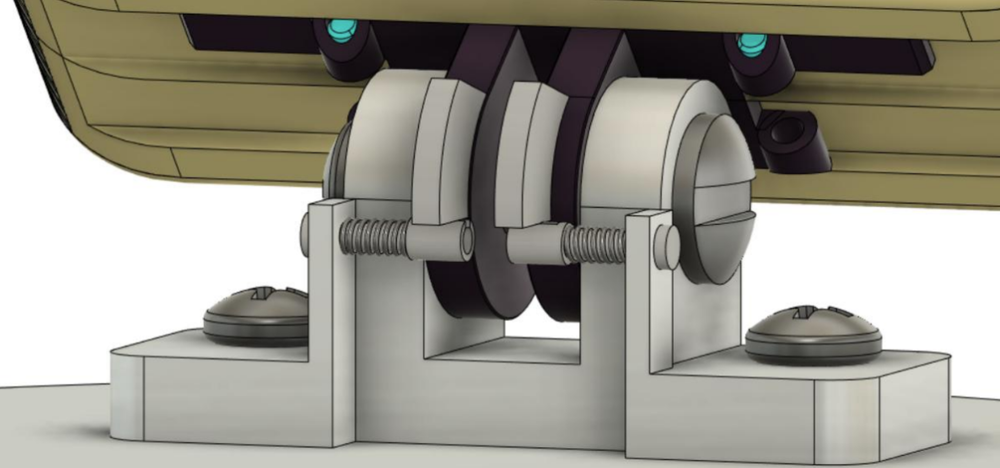
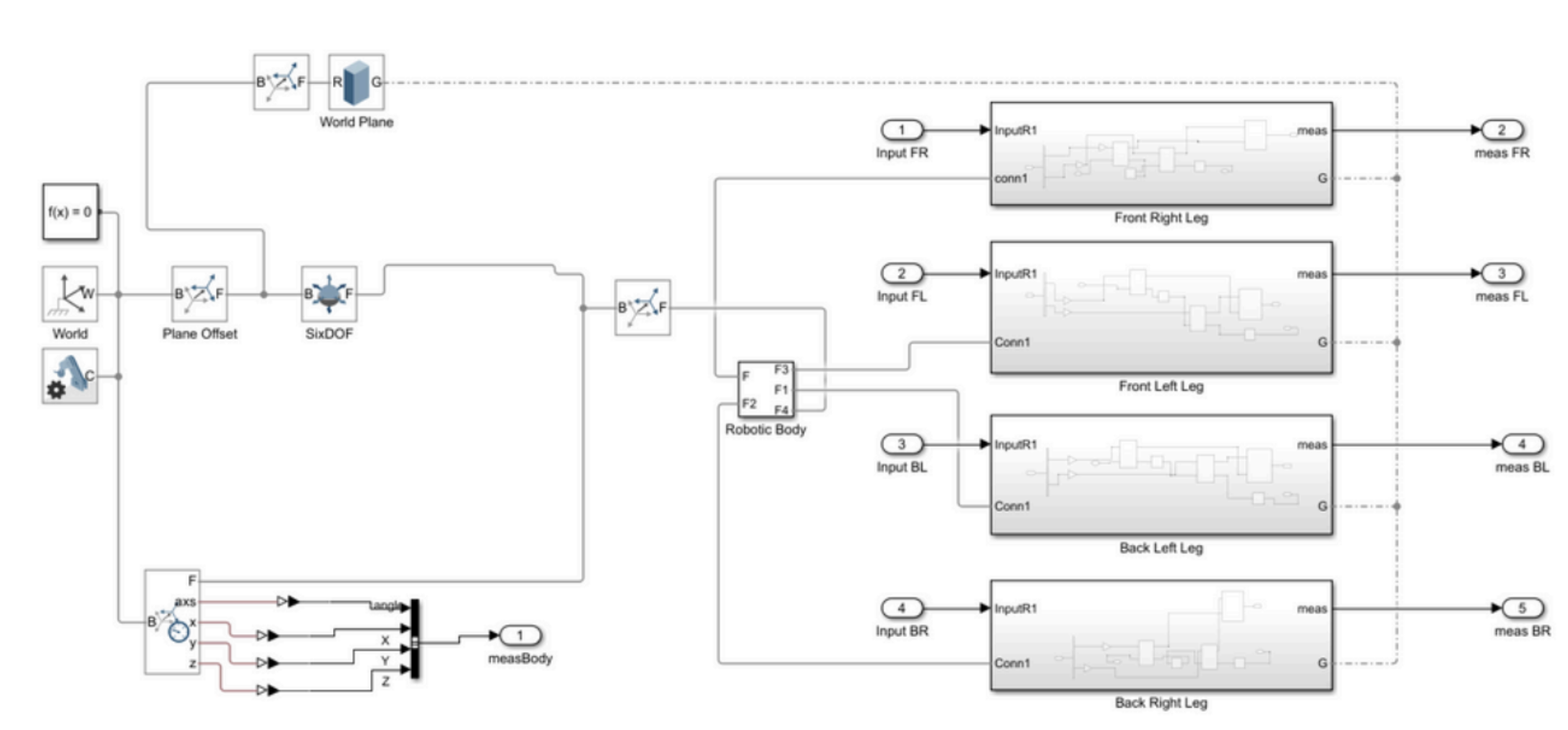
- We modelled a quadruped in MATLAB Simscape Multibody with J-shaped running blades on each leg, capturing compression, joint dynamics, and ground contact.
- We trained a DDPG actor-critic agent to run as efficiently as possible on those blades, tuning the reward function to encourage cheetah-like gait cycles from our biomechanics research.
Engineering principles: Not just setting velocity reward high!
- Biomimicry for Stability: Animals maintain stable body posture during running.
- Efficient Torque Management: Penalized abrupt joint direction changes to enhance torque efficiency.
- Dynamic Ground Contact Control: Minimized ground contact time by penalizing prolonged contact.
- Animal Gait Synchronization: Constrained front and back legs to move in phase.
The result: a gait 23% faster than Boston Dynamics' Spot.
Covered 23 m in 10 s in simulation with strong stability and energy efficiency.
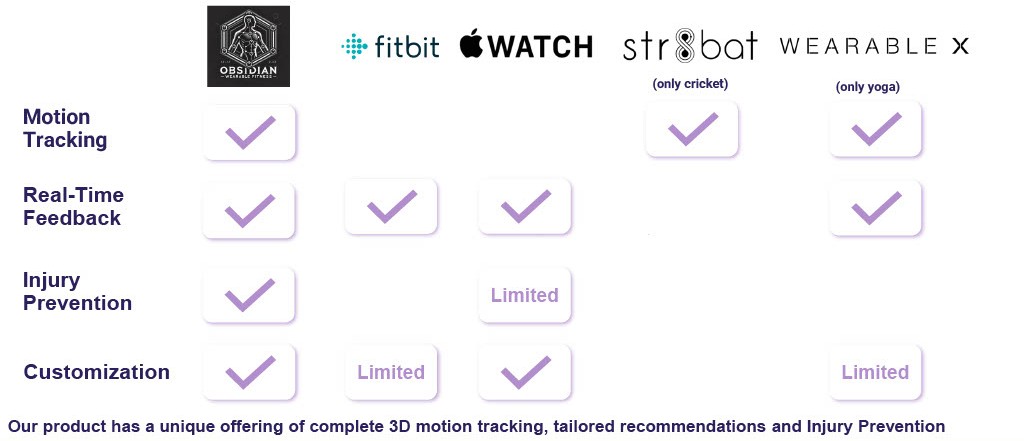
Obsidian Performance Gear
Bad form causes most training injuries. I built a company around fixing it in real time.
Founded the company and led engineering as CTO: a custom PCB, embedded AI, and real-time 3D motion feedback packed into a wearable.
- Real-time 3D motion analysis on resource-constrained hardware
- Designed a custom PCB with an I2C sensor network
- Embedded AI for real-time form correction
- Led the engineering team as CTO
$1.2M+ company valuation

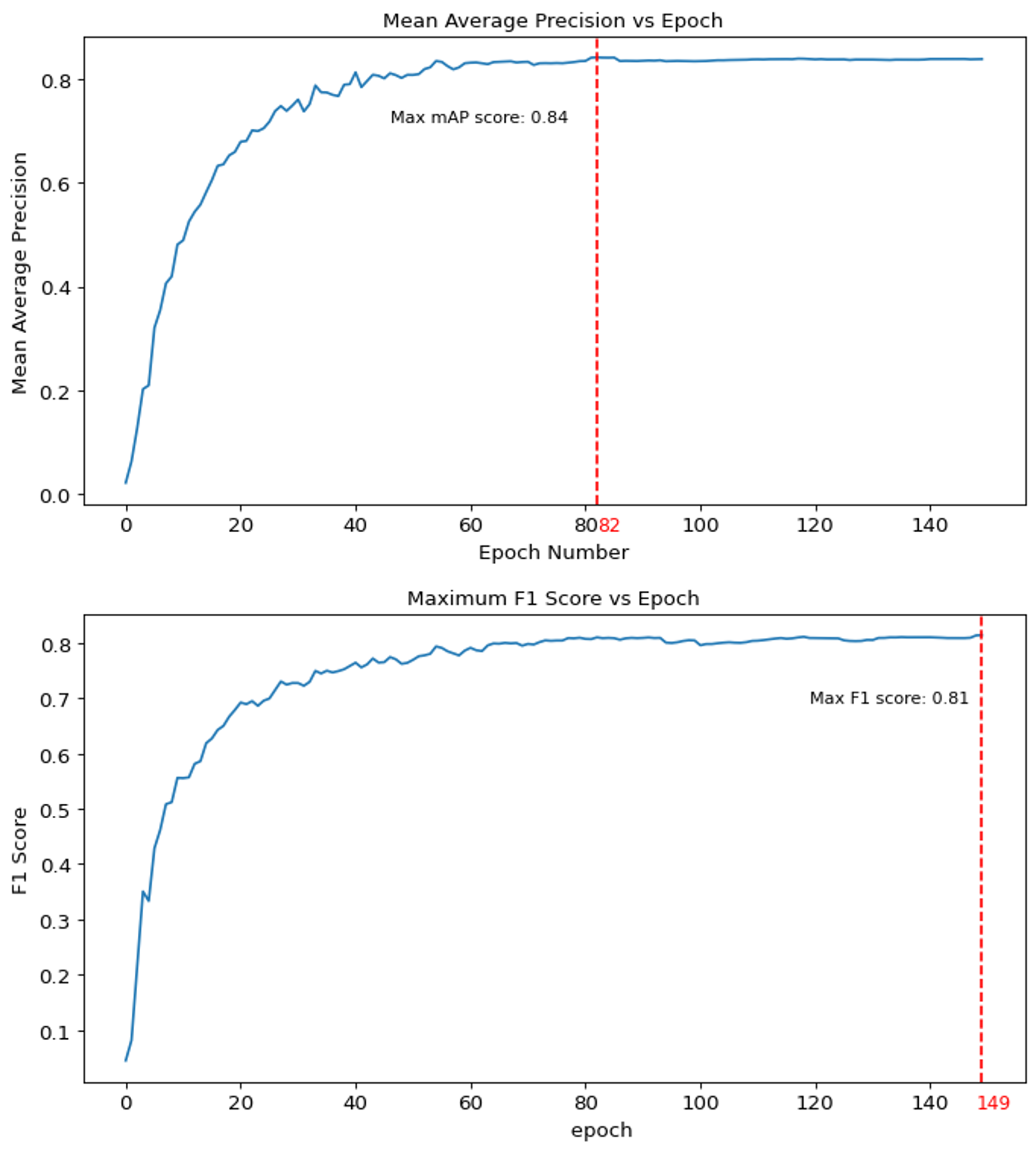
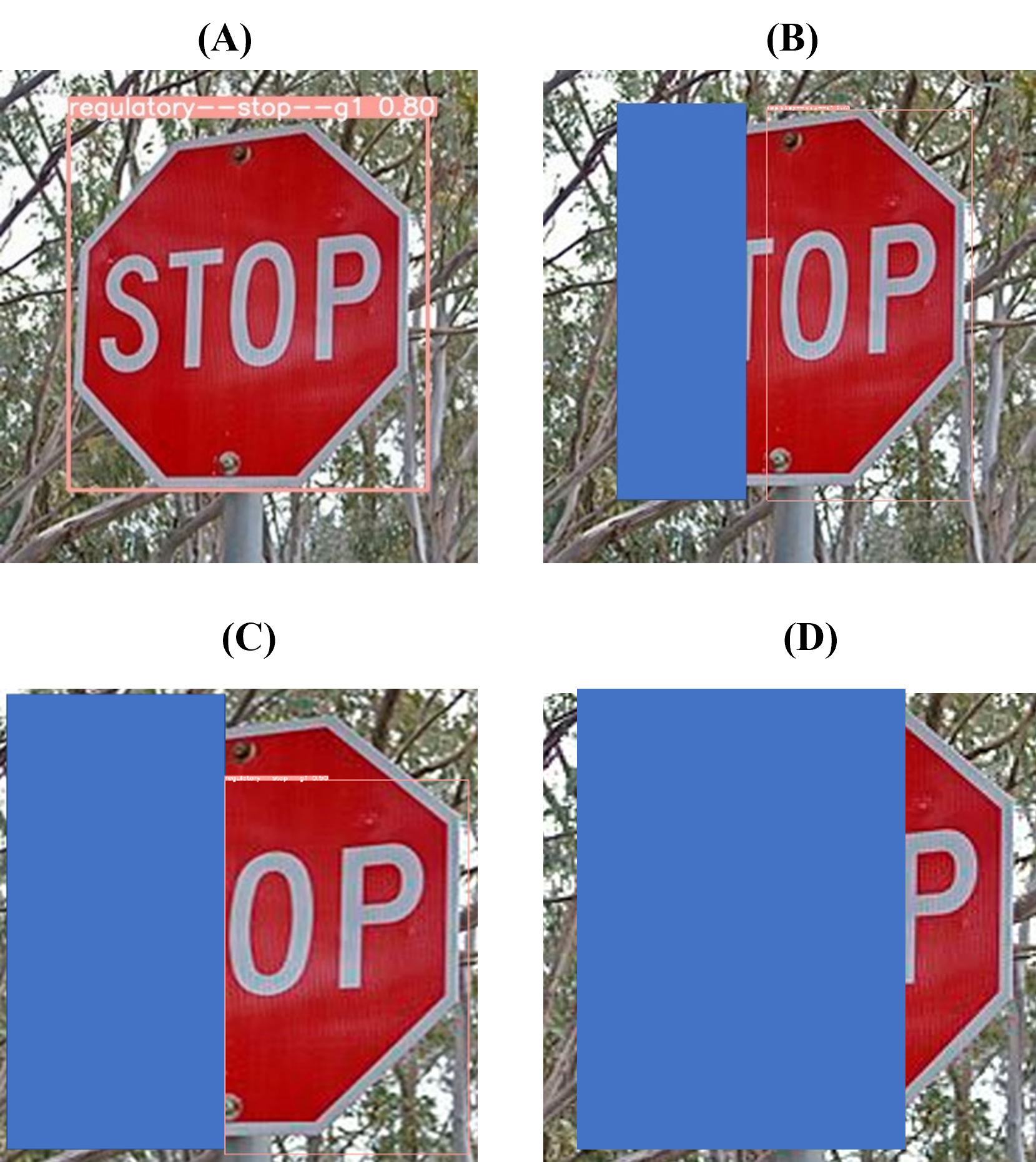
UCL Capstone: Traffic-Sign Detection & Narration
New and elderly drivers miss road signs. This dashboard reads them aloud in real time.
Trained a YOLOv5 pipeline on 100k+ images to recognize and narrate road signs in real time, outperforming Meta's benchmark model.
- Trained YOLOv5 on 100k+ Mapillary traffic-sign images
- Final model reached 84.4% mAP and 0.81 F1 (4.0 GPA capstone)
- Custom hybrid cropping and RGB background-elimination preprocessing
- Real-time narration prototype running at ~15.5 FPS
100k+ training images, outperforming Meta's benchmark model


Software & Systems Engineer
Lockheed Martin · 2023 - 2024Real-time combat simulation at scale.
Built networked simulation handling 500+ entities and secured £100k for AI-based quality-control automation.
Global Digital Strategy Analyst
HSBC · 2024The business side of engineering: digital strategy across 7 countries.
Identified $300k in savings and cut time-to-market by 11%.
Machine Learning Researcher
University College London · 2022Computer vision for healthcare.
90% accuracy skin-condition detection, deployed with NHS clinicians.
Engineering Intern, Wing Aerodynamics
Airbus · 2019First taste of aerospace engineering.
Modeled new wing tech and led the 1st-place team in an innovation competition.
MEng Mechanical Engineering (Robotics and Autonomous Systems)
University of California, Berkeley · August 2024 – PresentRobotics & autonomous systems, with a swarm-robotics capstone.
BEng Mechanical Engineering with Intelligent Systems
University College London (UCL) · September 2020 – 2024First-class engineering degree with a 4.0 GPA capstone.
Get in touch
Open to full-stack robotics roles: software, integration, and technical program management.